汽車工程系成功舉辦智能網(wǎng)聯(lián)汽車實訓設備專項培訓,深化通信與自動控制技術研究

為緊跟汽車產(chǎn)業(yè)智能化、網(wǎng)聯(lián)化發(fā)展趨勢,提升專業(yè)教學與實踐水平,我校汽車工程系成功組織開展了為期三天的“智能網(wǎng)聯(lián)汽車實訓設備操作與通信自動控制技術”專項培訓。此次培訓旨在使教師與實驗技術人員熟練掌握先進的智能網(wǎng)聯(lián)汽車教學實訓平臺,并深入探討其核心的通信與自動控制技術,為培養(yǎng)適應行業(yè)前沿的高素質技術技能人才奠定堅實基礎。
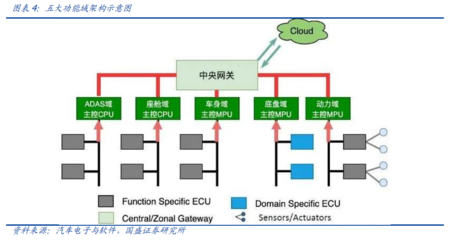
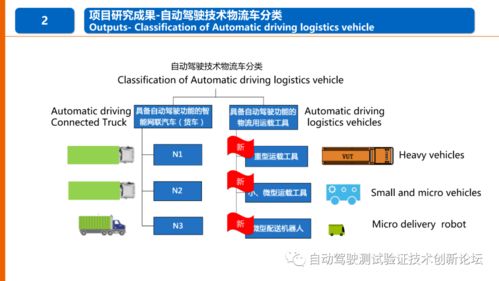
培訓首日,重點圍繞智能網(wǎng)聯(lián)汽車實訓平臺的整體架構展開。參訓人員在設備工程師的詳細講解下,系統(tǒng)學習了平臺的車載傳感器(如激光雷達、毫米波雷達、攝像頭、GPS/IMU組合導航系統(tǒng))、車載計算單元、V2X通信模塊以及線控底盤等核心硬件的功能、接口與集成原理。通過實物觀摩與初步操作,大家建立了對智能網(wǎng)聯(lián)汽車“感知-決策-執(zhí)行”技術鏈的直觀認識。
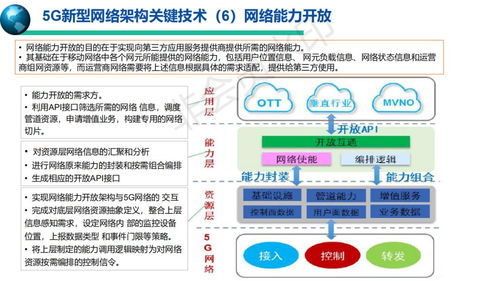
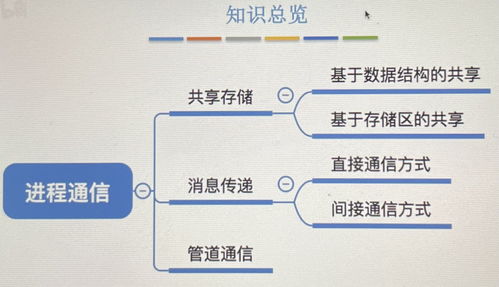
次日培訓的核心聚焦于“通信技術研究與應用”。講師深入淺出地介紹了支撐車聯(lián)網(wǎng)(V2X)的DSRC與C-V2X(尤其是5G NR-V2X)通信協(xié)議標準、技術原理及其在車輛協(xié)同感知、安全預警、高效通行等場景中的應用。參訓人員通過實訓平臺的網(wǎng)絡模擬與數(shù)據(jù)抓取工具,實際配置了V2X通信環(huán)境,并分析了車輛與車輛(V2V)、車輛與基礎設施(V2I)之間的消息交互流程,對通信時延、可靠性等關鍵指標進行了實測與研討,深化了對網(wǎng)聯(lián)協(xié)同控制底層支撐技術的理解。
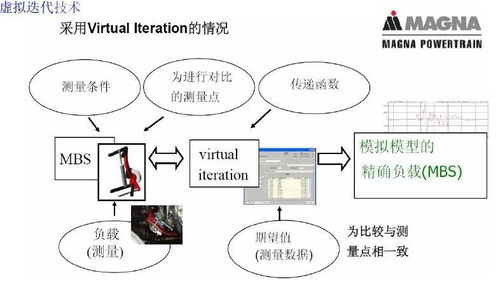
最后一天的培訓主題為“自動控制技術的集成與實踐”。內(nèi)容涵蓋智能網(wǎng)聯(lián)汽車中的縱向(自適應巡航ACC)與橫向(車道保持LKA)控制算法原理。培訓將理論與實訓高度結合,參訓人員利用平臺提供的控制算法接口與仿真環(huán)境,進行了控制參數(shù)調試、算法效果驗證等實踐操作。大家重點研討了如何基于傳感器融合感知結果,通過控制器設計實現(xiàn)車輛的精確路徑跟蹤與安全跟馳,并探索了網(wǎng)聯(lián)信息(如前方交通燈狀態(tài)、遠處障礙物信息)如何賦能預測性控制,以提升自動駕駛系統(tǒng)的平滑性與安全性。
此次培訓理論與實踐并重,講解與操作結合,現(xiàn)場學習氛圍濃厚,互動交流頻繁。參訓教師紛紛表示,通過系統(tǒng)學習與親手實踐,不僅快速掌握了新設備的操作維護技能,更對智能網(wǎng)聯(lián)汽車涉及的先進通信與控制技術有了更深入、更前沿的把握,為后續(xù)相關課程建設、實驗項目開發(fā)以及科研方向凝練提供了寶貴經(jīng)驗與思路。
汽車工程系主任在培訓中指出,智能網(wǎng)聯(lián)是汽車產(chǎn)業(yè)的革命性方向,本次專項培訓是系部加強“雙師型”教師隊伍建設、推動專業(yè)轉型升級的重要舉措。系部將持續(xù)加大在智能網(wǎng)聯(lián)、自動駕駛領域的投入,深化產(chǎn)教融合,將先進的實訓設備與技術研究有效轉化為優(yōu)質教學資源與創(chuàng)新動力,致力于培養(yǎng)更多能夠勝任智能汽車時代挑戰(zhàn)的優(yōu)秀工程師,為區(qū)域汽車產(chǎn)業(yè)發(fā)展貢獻更大力量。
如若轉載,請注明出處:http://www.ey591.cn/product/48.html
更新時間:2026-05-30 04:53:24